-
1 see
It can be seen ( we can see) that... Нетрудно показать, что; Очевидно, что;It is seen that Очевидно, что;A is seen by В А проявляется / обнаруживается при В;It will be seen that Ниже будет показано, что;Here it is seen that Здесь показано, что;This may be seen by В этом нетрудно убедиться, если;As seen in equation (1) Как следует из уравнения (1) ;which is seen..., который можно визуально наблюдатьEnglish-Russian dictionary of scientific and technical difficulties vocabulary > see
-
2 subsequently
1) со временем; позднее2) в дальнейшем; впоследствии3) нижеIt is subsequently shown that... Ниже будет показано, что...English-Russian dictionary of scientific and technical difficulties vocabulary > subsequently
-
3 S
- юг
- шиллинг
- среднеквадратическое отклонение воспроизводимости результатов испытаний
- сименс
- с шунтовой обмоткой
- режим работы электродвигателя в режиме
- расчетное напряжение
- прочность при растяжении перпендикулярно к лицевым поверхностям
- прочность при растяжении параллельно лицевым поверхностям
- прочность при изгибе
- приведенное напряжение в штанге
- предел прочности при сжатии
- Пороговое напряжение при КР
- подпись, сигнатура (порядковый номер печатного листа)
- площадь или общая площадь оребрённой поверхности
- плотность мощности
- план статистического приемочного контроля
- отношение скорости пара к скорости жидкости в двухфазном потоке
- отношение скоростей потока пара и воды в поперечном сечении потока
- Остаточное напряжение после релаксации
- общая площадь оребрённой поверхности
- нижний доверительный предел
- Начальное напряжение при испытании на релаксацию
- напряжение сжатия
- надбавка (классификационный показатель ставок)
- максимальное стандартное отклонение процесса
- Ллойдз
- газовое отношение
- вторичная обмотка
- В третьей области
- акустическая эффективность
вторичная обмотка
измерительный элемент
Обмотка и (или) устройство, измеряющее напряженность магнитного поля, через которые проходит результирующее магнитное поле.
[Система неразрушающего контроля. Виды (методы) и технология неразрушающего контроля. Термины и определения (справочное пособие). Москва 2003 г.]
вторичная обмотка
-
[Лугинский Я. Н. и др. Англо-русский словарь по электротехнике и электроэнергетике. 2-е издание - М.: РУССО, 1995 - 616 с.]Тематики
- виды (методы) и технология неразр. контроля
Синонимы
EN
Ллойдз
Корпорация поручителей-гарантов/страховщиков (андеррайтеры Ллойдз (Lloyds underwriters)) и страховых брокеров (брокеры Ллойдз (Lloyds brokers)), которая зародилась в кофейне на улице Таверни в Лондонском Сити в 1689 г. Она носит имя владельца этой кофейни Эдварда Ллойда. К 1774 г. она уже завоевала прочные позиции на Королевской бирже, а в 1871 г. была оформлена парламентским актом. Сейчас корпорация занимает новое здание на Лайм-стрит, построенное в 1986 г. по проекту архитектора Ричарда Роджерса. Ллойдз как корпорация сама непосредственно страхованием не занимается; вся ее деятельность обеспечивается примерно 260 брокерами Ллойдз, которые работают с публикой, и примерно 350 андеррайтерами/поручителями - гарантами синдикатов Ллойдз (syndicates of Lloyds underwriters), которые получают контракты через брокеров, а сами непосредственно с юридическими и физическими лицами не работают. Каждый из примерно 30 000 андеррайтеров Ллойдз, прежде чем стать членом корпорации, должен внести в корпорацию значительную сумму денег и принять на себя неограниченную ответственность. Они сгруппированы в синдикаты, которыми управляет руководитель синдиката или агент, но большая часть членов синдикатов - это самостоятельные имена (names) (члены Ллойдз, осуществляющие и подписывающие операции гарантии-поручительства, но не организующие их, которые делят и прибыли, и убытки синдиката и предоставляют рисковый капитал). Ллойдз давно и традиционно специализировалась в морском страховании, но сейчас она покрывает практически все страховые риски.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
- Lloyd&acut
- s
надбавка (классификационный показатель ставок)
—
[[Англо-русский словарь сокращений транспортно-экспедиторских и коммерческих терминов и выражений ФИАТА]]Тематики
EN
общая площадь оребрённой поверхности
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
отношение скоростей потока пара и воды в поперечном сечении потока
проскальзывание
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
Синонимы
EN
отношение скорости пара к скорости жидкости в двухфазном потоке
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
плотность мощности
Плотность мощности это мощность в расчете на единицу площади, перпендикулярной к направлению распространения электромагнитной волны; обычно она выражается в ваттах в квадратный метр (МСЭ-Т K.52).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
площадь или общая площадь оребрённой поверхности
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
подпись, сигнатура (порядковый номер печатного листа)
тетрадь (книжного блока)
сфальцованный печатный лист
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
Синонимы
EN
с шунтовой обмоткой
с параллельной обмоткой
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
Синонимы
EN
сименс
См
(единица электрической проводимости)
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
Синонимы
- См
EN
шиллинг
Стандартная денежная единица Австрии, равная 100 грошам.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
юг
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
3.6 режим работы электродвигателя в режиме S2: Номинальный кратковременный режим работы с длительностью периода неизменной номинальной нагрузки, равной 60 мин.
Источник: ГОСТ Р 50703-2002: Комбайны проходческие со стреловидным исполнительным органом. Общие технические требования и методы испытаний оригинал документа
3.5 расчетное напряжение (design stress) sS: Допускаемое напряжение для данного применения, полученное делением MRS на коэффициент С и округленное до ближайшего нижнего значения ряда R20, т.е.
 (1)
(1)Источник: ГОСТ ИСО 12162-2006: Материалы термопластичные для напорных труб и соединительных деталей. Классификация и обозначение. Коэффициент запаса прочности оригинал документа
3.4 нижний доверительный предел (lower confidence limit) sLCL, МПа: Величина, определяющая свойство рассматриваемого материала, представляющая собой 97,5 % нижнего доверительного предела предсказанной длительной гидростатической прочности при 20 °С на 50 лет при внутреннем давлении воды.
Источник: ГОСТ ИСО 161-1-2004: Трубы из термопластов для транспортирования жидких и газообразных сред. Номинальные наружные диаметры и номинальные давления. Метрическая серия оригинал документа
3.7 расчетное напряжение (design stress) ss: Допускаемое напряжение для данного применения,
полученное делением MRS на коэффициент запаса прочности С и округленное до ближайшего нижнего значения ряда R20 по ИСО 3, т. е.
 (1)
(1)Выражают в мегапаскалях.
Источник: ГОСТ ИСО 161-1-2004: Трубы из термопластов для транспортирования жидких и газообразных сред. Номинальные наружные диаметры и номинальные давления. Метрическая серия оригинал документа
3.3 приведенное напряжение в штанге sпр: Напряжение, включающее значения напряжений, характеризующих цикл нагружения в верхней штанге каждой ступени колонны и определяемое по формуле
где smax - максимальное напряжение в теле штанги за цикл нагружения;
sа - амплитудное напряжение, равное (smax - smin)/2 (smin - минимальное напряжение в теле штанги за цикл нагружения).
Источник: ГОСТ Р 51161-2002: Штанги насосные, устьевые штоки и муфты к ним. Технические условия оригинал документа
3.2 предел прочности при сжатии (compressive strength) sт: Отношение максимального значения сжимающей силы Fmк первоначальной площади поперечного сечения образца, когда относительная деформация e образца в состоянии текучести (см. рисунок 1b) или при его разрушении (см. рисунок 1а) составляет менее 10 %.
3.1 прочность при растяжении перпендикулярно к лицевым поверхностям (tensile strength perpendicular to faces) smt: Отношение максимального значения силы растяжения, действующей перпендикулярно к лицевым поверхностям образца, к площади поперечного сечения образца.
3.1 прочность при растяжении параллельно лицевым поверхностям (tensile strength parallel to faces) st: Отношение максимального значения силы, действующей при растяжении образца параллельно лицевым поверхностям, к площади поперечного сечения рабочего участка образца.
В третьей области показатель степени равен 8 - 10, а влажность отпускаемого пара более 0,2 %. В этой области процесс носит кризисный характер и действительный уровень воды в барабане приближается к пароотборным трубам.
Точка перехода из 2-й области в 3-ю называется критической и работа сепарационных устройств в этой области недопустима. Работа котла в 3-й области сильно зависит от нагрузки, при этом влажность отпускаемого пара составляет 0,2 - 1,0 % и более. Ленточные солемеры показывают резкое увеличение солесодержания пара (броски).
С паровой нагрузкой котла D связаны следующие характеристики сепарационных устройств:
массовая нагрузка зеркала испарения

осевая подъемная скорость пара
удельная паровая безразмерная нагрузка k [9[
где Fз.и. - площадь зеркала испарения (или площадь пароприемного потолка).
Следующий параметр, который существенно влияет на величину влажности пара, а значит и на величину критических нагрузок, это высота активного сепарационного объема. Связь между влажностью пара, паропроизводительностью и высотой парового объема hп можно представить следующей формулой [5]
 (4)
(4)где М- размерный коэффициент, определяемый физическими свойствами воды и пара.
Как видно из этой формулы, существует обратно пропорциональная зависимость между влажностью пара и высотой парового объема. Экспериментально было показано, что при увеличении высоты парового объема более 1000 мм, влажность пара уже практически мало зависит от дальнейшего ее увеличения [4] - [7].
На работу сепарационных устройств котлов существенное влияние оказывает солесодержание котловой воды (SKB). Проявляется это следующим образом. При работе котла при постоянной паропроизводительности при увеличении солесодержания котловой воды происходит очень плавное увеличение солесодержания пара, при достижении определенного значения солесодержания котловой воды происходит резкое увеличение влажности пара котла (солесодержания), регистрирующие солемеры отмечают резкое увеличение солесодержания пара (бросок). Объяснить это можно следующим образом: по мере увеличения концентрации веществ в котловой воде и прежде всего коллоидных частиц оксидов железа, шлама и др. веществ, поверхностный слой приобретает структурную вязкость. Длительность существования паровых пузырей до их разрушения увеличивается (набухание), пленки паровых пузырей успевают утониться и при разрыве их образуется большое количество мелких капель (трудно сепарируемых), вода приобретает способность к вспениванию. Значение солесодержания котловой воды, при котором происходит резкое увеличение влажности пара, называется критическим (
 ). Величина критического солесодержания зависит от давления пара в котле, конструкции сепарационных устройств, солевого состава воды («букета»), паровой нагрузки сепарационных устройств и т.д. Наиболее точно критическое солесодержание котловой воды можно определить только на основании теплохимических испытаний конкретного котла. Ориентировочно для котлов низкого давления величина критического солесодержания составляет около 3000 мг/кг, для котлов среднего давления - 1300 - 1500 мг/кг, а для котлов высокого давления - 300 - 500 мг/кг.
). Величина критического солесодержания зависит от давления пара в котле, конструкции сепарационных устройств, солевого состава воды («букета»), паровой нагрузки сепарационных устройств и т.д. Наиболее точно критическое солесодержание котловой воды можно определить только на основании теплохимических испытаний конкретного котла. Ориентировочно для котлов низкого давления величина критического солесодержания составляет около 3000 мг/кг, для котлов среднего давления - 1300 - 1500 мг/кг, а для котлов высокого давления - 300 - 500 мг/кг.Одним из вариантов приспособления работы котлов на воде закритического солесодержания при умеренных значениях непрерывной продувки является применение ступенчатого испарения котловой воды. Его сущность состоит в том, что водяной объем барабана и парообразующие циркуляционные контуры разбиваются на два или три независимых отсека с подачей всей питательной воды только в 1-й отсек и отводом воды в продувку из последнего отсека. При такой схеме питания резко возрастает «внутренняя» продувка первого (чистого) отсека, которая будет равна (nп + Р) % (при выполнении котла, например по двухступенчатой схеме испарения), а увеличение продувки будет составлять в
 раза, по сравнению с котлом без ступенчатого испарения. В связи с этим концентрация солей в котловой воде 1-й ступени резко уменьшается и соответственно улучшается качество пара. Для 2-й ступени испарения концентрация солей продувочной воды будет практически такой же, как и у котла без ступенчатого испарения (при одинаковых значениях непрерывных продувок Р = const для обеих схем). Если принять, что коэффициенты выноса (или влажность пара) до и после перевода котла на ступенчатое испарение были одинаковыми, то качество пара (солесодержание) котла при переводе на ступенчатое испарение будет выше, чем у котла с одноступенчатой схемой испарения. Если же качество пара (солесодержание) котла со ступенчатым испарением принять одинаковым, как и у котла без ступеней испарения, то тогда котел со ступенчатым испарением будет работать с меньшей величиной непрерывной продувки (чем котел без ступеней испарения). В отечественном котлостроении в качестве сепараторов пара последних ступеней испарения применяют, как правило, выносные циклоны. Выносные циклоны - это устройства, которые лучше всего приспособлены для работы на воде повышенного солесодержания. (За счет развития соответствующей паровой высоты и использования центробежных сил для подавления вспенивания).
раза, по сравнению с котлом без ступенчатого испарения. В связи с этим концентрация солей в котловой воде 1-й ступени резко уменьшается и соответственно улучшается качество пара. Для 2-й ступени испарения концентрация солей продувочной воды будет практически такой же, как и у котла без ступенчатого испарения (при одинаковых значениях непрерывных продувок Р = const для обеих схем). Если принять, что коэффициенты выноса (или влажность пара) до и после перевода котла на ступенчатое испарение были одинаковыми, то качество пара (солесодержание) котла при переводе на ступенчатое испарение будет выше, чем у котла с одноступенчатой схемой испарения. Если же качество пара (солесодержание) котла со ступенчатым испарением принять одинаковым, как и у котла без ступеней испарения, то тогда котел со ступенчатым испарением будет работать с меньшей величиной непрерывной продувки (чем котел без ступеней испарения). В отечественном котлостроении в качестве сепараторов пара последних ступеней испарения применяют, как правило, выносные циклоны. Выносные циклоны - это устройства, которые лучше всего приспособлены для работы на воде повышенного солесодержания. (За счет развития соответствующей паровой высоты и использования центробежных сил для подавления вспенивания).В котлах высокого давления наряду с капельным уносом имеет место значительный избирательный унос различных солей и прежде всего кремнекислоты (SiO2), за счет непосредственного физико-химического растворения солей в паре. Избирательный вынос кремнекислоты (при рН = 9,0 - 12,0) для котлов с давлением 115 кгс/см2 составляет 2,0 - 1,0 %, а для котлов с давлением 155 кгс/см2 - 4,0 - 2,5 % [9].
Для снижения кремнесодержания в паре котлов высокого давления в сепарационной схеме предусматривается паропромывочное устройство. Наличие этого устройства приводит к некоторым особенностям работы всей сепарационной схемы котлов высокого давления, по сравнению с котлами среднего давления.
В котлах высокого давления эффективность паропромывочного устройства характеризуется коэффициентом промывки
 (5)
(5)где SiO2н.п. - кремнесодержание пара на выходе из барабана;
SiO2н.п. - кремнесодержание питательной воды.
Коэффициент уноса с паропромывочного устройства Кпромопределяется по формуле
 (6)
(6)где SiO2пром - кремнесодержание воды на паропромывочном устройстве.
Для котлов высокого давления по данным испытаний Кпром составляет 8 - 10 %.
Кремнесодержание промывочной воды определяется по формуле
 (7)
(7)где SiO2сл - кремнесодержание воды на сливе с паропромывочного устройства.
Степень очистки пара на паропромывочном устройстве определяется по формуле
 (8)
(8)где SiO2н.п.(до) - кремнесодержание насыщенного пара до паропромывочного устройства.
Кремнесодержание пара до паропромывочного устройства определяется из следующей формулы
SiO2н.п.(до) = К · SiO2к.в, (9)
где SiO2к.в. - кремнесодержание котловой воды;
К - коэффициент уноса кремниевой кислоты из котловой воды в пар до промывки.
Из приведенных формул следует, что кремнесодержание пара после промывки (пар котла SiO2н.п.) зависит как от кремнесодержания питательной воды, так и от кремнесодержания пара до промывки.
В конечном итоге чем ниже будет кремнесодержание промывочной воды (SiO2пром), тем чище будет пар котла. Концентрация кремнекислоты в промывочном слое зависит, как от качества питательной воды, так и от количества кремнекислоты, поступающей из парового объема до промывки. При неналаженной работе сепарационных устройств до промывки, наряду с избирательным уносом [формула (9)] возможен вынос значительного количества капель котловой воды, где кремнесодержание в 5 - 8 раз выше, чем в питательной воде. Попадание капель котловой воды на промывку (капельный унос) приводит к увеличению кремнесодержания промывочной воды и, как следует из формулы (6), приводит к увеличению кремнесодержания пара котла.
Качество пара котла зависит от следующих основных факторов:
Источник: СО 34.26.729: Рекомендации по наладке внутрикотловых сепарационных устройств барабанных котлов
3.1 прочность при изгибе (bending strength) sb: Максимальное напряжение, возникающее в образце под действием максимальной силы Fm, зарегистрированной при изгибе.
3.2 напряжение сжатия (compressive stress) sс: Отношение сжимающей нагрузки к первоначальной площади поперечного сечения образца данной толщины.
3.1 прочность при растяжении перпендикулярно к лицевым поверхностям (tensile strength perpendicular to faces) smt: Отношение максимального значения силы растяжения, действующей перпендикулярно к лицевым поверхностям образца, к площади поперечного сечения образца.
3.10 план статистического приемочного контроля sметода, s метод (s method acceptance sampling plan): План статистического приемочного контроля по количественному признаку, использующий известное значение стандартного отклонения процесса.
Примечание - Адаптированное определение по ИСО 3534-2.
Источник: ГОСТ Р ИСО 3951-5-2009: Статистические методы. Процедуры выборочного контроля по количественному признаку. Часть 5. Последовательные планы на основе AQL для известного стандартного отклонения оригинал документа
3.16 максимальное стандартное отклонение процесса (maximum process standard deviation); MPSD, smax: Наибольшее значение стандартного отклонения процесса для данного кода объема выборки и предельно допустимого уровня несоответствий (3.6), при котором возможно выполнение критерия приемки объединенного контроля с двумя границами поля допуска при любой жесткости контроля (нормальном, усиленном послабленном контроле), когда дисперсия процесса известна.
[ИСО 3534-2]
Примечание 1 - MPSD зависит от того, какой тип контроля применяют (объединенный, индивидуальный или сложный), но не зависит от жесткости контроля.
Примечание 2 - Адаптированное определение по ИСО 3534-2.
Источник: ГОСТ Р ИСО 3951-5-2009: Статистические методы. Процедуры выборочного контроля по количественному признаку. Часть 5. Последовательные планы на основе AQL для известного стандартного отклонения оригинал документа
3. Начальное напряжение при испытании на релаксацию si - напряжение, соответствующее начальной нагрузке образца.
Источник: ГОСТ 28334-89: Проволока и канаты стальные для армирования предварительно-напряженных железобетонных конструкций. Метод испытания на релаксацию при постоянной деформации оригинал документа
4. Остаточное напряжение после релаксации sо - действительное напряжение образца по истечении определенного промежутка времени, прошедшего с начала испытания, при условии, что общая длина образца не изменялась в течении испытания. Остаточное напряжение рассчитывается для действительной площади поперечного сечения образца, измеренного перед началом испытания.
Источник: ГОСТ 28334-89: Проволока и канаты стальные для армирования предварительно-напряженных железобетонных конструкций. Метод испытания на релаксацию при постоянной деформации оригинал документа
3.4.2 газовое отношение scg (gas fraction): Отношение энергии взрывных газов Qg к энергии взрывчатого вещества QC.
Источник: ГОСТ Р 53571-2009: Акустика. Шум, производимый на стрельбищах. Часть 2. Определение акустических характеристик дульной волны и звука пули путем расчета оригинал документа
3.4.3 акустическая эффективность sас (acoustical efficiency): Доля энергии взрывчатого вещества, превращающаяся в акустическую энергию.
Источник: ГОСТ Р 53571-2009: Акустика. Шум, производимый на стрельбищах. Часть 2. Определение акустических характеристик дульной волны и звука пули путем расчета оригинал документа
3.21 среднеквадратическое отклонение воспроизводимости результатов испытаний sR:Среднеквадратическое отклонение результатов испытаний, полученных в условиях воспроизводимости (см. 3.19) [5].
3.2 напряжение сжатия (compressive stress) sс: Отношение сжимающей нагрузки к первоначальной площади поперечного сечения образца данной толщины.
3.21 среднеквадратическое отклонение воспроизводимости результатов испытаний sR:Среднеквадратическое отклонение результатов испытаний, полученных в условиях воспроизводимости (см. 3.19) [5].
2. Пороговое напряжение при КР (sкр) - напряжение, выше которого трещины от КР возникают и растут при определенных условиях испытания.
Источник: ГОСТ 9.901.1-89: Единая система защиты от коррозии и старения. Металлы и сплавы. Общие требования к методам испытаний на коррозионное растрескивание оригинал документа
Англо-русский словарь нормативно-технической терминологии > S
-
4 automate programmable à mémoire
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Франко-русский словарь нормативно-технической терминологии > automate programmable à mémoire
5 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
6 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
7 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
8 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
9 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
10 give
1. Ithe door gave дверь подалась; the ice gave лед сломался /не выдержал/; the foundations are giving фундамент оседает; at the height of the storm the bridge gave в самый разгар бури мост не выдержал и рухнул; his knees seemed to give ему казалось, что у него подкашиваются ноги; the branch gave but did not break ветка прогнулась, но не сломалась; а soft chair (a bed, a mattress, etc.) gives [when one sits on it] мягкий стул и т. д. проминается [, когда на него садятся]; the frost is beginning to give мороз начинает слабеть2. II1) give in some manner. give generously /unsparingly, abundantly/ щедро и т. д. давать /дарить, одаривать/; give grudgingly нехотя делать подарки2) give in some manner this chair (the mattress, the bed, etc.) gives comfortably (a lot) этот стул и т. д. приятно (сильно) проминается; the springs won't give enough /much/ пружины довольно тугие; the горе has given a good deal веревка сильно растянулась /ослабла/; give for some time the frost did not give all day мороз не отпускал весь день3. IIIgive smth.1) give food (medicine, L 3, etc.) давать еду и т. д., give presents дарить /делать/ подарки; give a grant давать дотацию /пособие/; give a scholarship предоставлять стипендию; give a medal награждать медалью; give alms подавать милостыню2) give a message передавать записку /сообщение/; give one's regards передать привет3) give a large crop (10 per cent profit, etc.) приносить / давать/ большой урожай и т. д.; give fruit плодоносить; give milk давать молоке; give heat излучать тепло; the lamp gives a poor light лампа светит тускло /дает, излучает тусклый свет/; his work gives good results его работа дает хорошие результаты; two times two /two multiplied by two/ gives four дважды два give четыре4) give facts (news, details, the following figures, etc.) приводить /сообщать/ факты и т. д.; give an example /an instance/ приводить /давать/ пример: the dictionary doesn't give this word в словаре нет этого слова; the list gives ten names в списке [приведено /указано/] / список содержит/ десять имен; he gave a full account of the event он все рассказал /дал полный отчет/ об этом событии; he gave no particulars он не сообщил никаких подробностей; give a portrait (a character, the scenery of the country, etc.) нарисовать портрет и т. д.; in his book he gives a description of their customs в своей книге он описывает их нравы; give evidence /testimony/ давать показания; give one's name and address дать /назвать/ свой фамилию и адрес5) the thermometer gives forty degrees термометр показывает сорок градусов; the barometer gives rain барометр пошел на дождь; give no sign of life не подавать признаков жизни; give no sign of recognition a) не подать виду, что узнал; б) не узнать; give no sign of embarrassment нисколько не смутиться6) give a dinner (a dinner party, a ball, a party, a concert, a performance, etc.) давать /устраивать/ обед и т. д.7) give lessons (instruction, exact information, etc.) давать уроки и т. д., give smth. in smth. give lessons in mathematics (instruction in golf, etc.) давать уроки по математике и т. д.; give smth. on smth. give lectures on psychology (on biology, on various subjects, etc.) читать лекции по психологии и т. д., give a lecture прочитать лекцию, выступить с лекцией; give a song (one of Beethoven's sonatas, a concerto, etc.) исполнять песню и т. д., give a recital (a recitation) выступать с сольным концертом (с художественным чтением)8) give one's good wishes желать всего доброго / хорошего/; give one's blessing давать свое благословение: give a toast провозглашать тост; give smb.'s health /the health of smb./ поднимать тост за чье-л. здоровье9) give a point in the argument уступить по одному какому-л. вопросу в споре; give way /ground/ отступать, сдавать [свои] позиции; the army (our troops, the crowd, etc.) gave way армия и т. д. отступила; the door (the axle, the railing, etc.) gave way дверь и т. д. подалась; the bridge (the ice, the floor, the ground, etc.) gave way мост и т. д. провалился; the rope /the line/ gave way веревка лопнула; my legs gave way у меня подкосились ноги; his health is giving way его здоровье пошатнулось; his strength is giving way силы оставляют его; if he argues don't give way если он будет спорить, не уступайте10) give a decision сообщать решение; give judg (e)ment выносить приговор; give notice а) предупреждать о предстоящем увольнении; б) уведомлять11) semiaux give a look /а glance/ взглянуть, бросить взгляд; give a jump /а leap/ (под)прыгнуть, сделать прыжок; give a push (a pull) толкнуть (потянуть); give a kick ударить ногой, лягнуть; give a smile улыбнуться; give a kiss поцеловать; give a loud laugh громко засмеяться /рассмеяться/; give a cry /а shout/ издавать крик; give a sigh вздохнуть; give a groan застонать; give a sob всхлипнуть; give a start вздрогнуть; give a nod кивнуть; give a shake [of one's head] отрицательно покачать головой; give an injection делать укол; give a shrug of the shoulders пожать плечами; give a wave of the hand махнуть рукой; give a blow ударить; give a rebuff давать отпор; give a beating задать порку, избить; give chase пускаться в погоню; give a wag of the tail вильнуть хвостом; give an order (a command, instructions, etc.) отдавать приказ /распоряжение/ и т. д.; give an answer /а reply/ давать ответ, отвечать; give help оказывать помощь; give the alert объявлять тревогу; give a warning делать предупреждение; give advice советовать, давать совет; give a suggestion предлагать, выдвигать предложение; give a promise (one's word, one's pledge, etc.) давать обещание и т. д.; give shelter давать /предоставлять/ убежище; give a volley дать залп; the gun gave a loud report раздался громкий ружейный выстрел; give offence обижать, наносить обиду; give battle давать бой; give a chance (an opportunity, power, etc.) предоставлять /давать/ возможность и т. д.4. IVgive smth. somewhere1) give back the books you borrowed (my pen, my newspaper, etc.) возвращать книги, которые вы взяли и т. д.; give smth. in some manner give money generously (grudgingly, freely, etc.) щедро и т. д. давать деньги; regularly give presents регулярно делать подарки2) give smth. at some time give a message immediately немедленно передать записку3) give smth. at some time give profit (10 per cent, etc.) regularly (annually, etc.) регулярно и т. д. приносить прибыль и т. д.4) give smth. in some manner give an extract in full (at length, in detail, etc.) приводить отрывок полностью и т. д.5) semiaux give smth. in some manner give aid willingly охотно оказывать помощь; give one's answers loudly (distinctly, etc.) давать ответы /отвечать/ громко и т. д.5. V1) give smb. smth. give me your pencil (him this book, her your hand, me a match, the child a glass of milk, the boy his medicine, etc.) дайте мне ваш карандаш и т. д., give smb. a present сделать кому-л. подарок; give him watch (her a ring, etc.) подарить ему часы и т. д.; give her a bunch of flowers преподнести ей букет цветов; what has he given you? что он вам подарил /преподнес/?; give him a letter from his mother (her a note from me, etc.) передавать ему письмо от матери и т. д.; give an actor a role (him a job, etc.) предлагать /давать/ актеру роль и т. д.; give smb. the place of honour отвести кому-л. почетное место; give me long distance дайте мне междугородную; I give you my word (my promise, my consent, etc.) 'даю вам слово и т. д.; give smb. smth. for smth. give smb. a watch for a present преподнести кому-л. часы в качестве подарка; give women equal pay with men for their work оплачивать труд женщин наравне с трудом мужчин; give smb. smth. in smth. give them parts in his new play распределять между ними роли в его новой пьесе; give smb. smb. she gave him a beautiful baby boy она родила ему прекрасного мальчика2) give smb. smth. give him the message (me the letter, etc.) передавать ему записку и т. д.; give smb. one's love (one's compliments, one's kind regards, etc.) передавать кому-л. привет и т. д.; give him my thanks передайте ему мою благодарность; I give you my very best wishes желаю вам всего самого лучшего3) give smb. smth. give smb. an illness (measles, a sore throat, etc.) заразить кого-л. какой-л. болезнью и т. д.; you've given me your cold вы заразили меня насморком, я от вас заразился насморком4) give smb., smth. smth. give us warmth and light (us fruit, people meat, us milk, us wool and leather, etc.) давать нам тепло и свет и т. д.; give men pleasure (him joy, the children enjoyment, her satisfaction, etc.) доставлять людям удовольствие и т. д.; give smb. [much] pain (much trouble, sorrow, etc.) причинять кому-л. боль и т. д.; too much noise gives me a headache от сильного шума у меня начинается головная боль; give smb. courage (me patience, him strength, her more self-confidence, etc.) придавать кому-л. мужество и т. д.; that gave me the idea of travelling это навело меня на мысль о путешествии; give smth. flavour придавать чему-л. вкус5) give smb. smth. give the commission an account of his trip (us a good description of the man, him wrong information, him good proof, etc.) давать комиссии отчет /отчитываться перед комиссией/ о своей поездке и т. д.; give me your opinion сообщите мне свое мнение; give us human nature truthfully (the reader a true picture of his age, etc.) описать /воссоздать/ для нас подлинную картину человеческой природы и т. д.6) give smb. smth. give the child a name дать ребенку имя; give smth. smth. give the book a strange title дать книге странное заглавие /название/; this town gave the battle its name эта битва получила название по городу, близ которого она произошла7) give smb. smth. give smb. lessons (music lessons, lessons in French, consultations, instruction, etc.) давать кому-л. уроки и т. д., give smb. a concerto (a play, etc.) исполнить для кого-л. концерт и т. д.; give us Bach (us another song, etc.) исполните нам /для нас/ Баха и т. д.; who will give us a song? кто вам споет? || give smb. an example служить кому-л. примером; give the other boys an example подавать другим мальчикам пример8) give smb. smth. give smb. good morning (him good day, us good evening, etc.) пожелать кому-л. доброго утра и т. д., give smb. one's blessing благословлять кого-л.; give smb. smth., smb. give them our country (our host, the Governor, etc.) предложить им выпить за нашу страну и т. д.9) give smb. smth. give smb. six months' imprisonment (five years, two years of hard labour, etc.) приговорить кого-л. к пяти месяцам тюремного заключения и т. д.10) semiaux give smb., smth. smth. give smb. a look (a fleeting glance, etc.) бросить на кого-л. взгляд и т. д.; give smb. a smile улыбнуться кому-л.; give smb. a kiss поцеловать кого-л.; give smb. a blow нанести кому-л. удар, стукнуть кого-л.; give smb. a push толкнуть кого-л.; give smb. a kick лягнуть, ударить кого-л. ногой; give smb. a nod кивнуть кому-л. [головой]; give smb. a beating избить /поколотить/ кого-л.; give one's hat a brush почистить шляпу; give a blackboard a wipe стереть с доски; give smb.'s hand a squeeze сжать или пожать кому-л. руку; give them our support (him help, him a hand, them every assistance, etc.) оказать им поддержку и т. д.; give the matter every care внимательно отнестись к вопросу; give smb. a warning предупреждать кого-л.; give smb. an order (instructions, etc.) отдать кому-л. приказ и т. д.; give smb. an answer /а reply/ давать кому-л. ответ, отвечать кому-л.; my old coat gives me good service мое старое пальто все еще служит мне; give me a chance (him another opportunity, etc.) предоставьте мне возможность и т. д.6. VII1) give smth. to do smth. give a signal to start (notice to leave, etc.) давать сигнал к отправлению и т. д.; give a push to open the door толкнуть дверь, чтобы она открылась; give a lot to know it (anything to know what happened, the world to have it, the world to secure such a thing, etc.) многое отдать, чтобы узнать это и т. д. || give smb. to understand дать кому-л. понять2) give smb. smth. to do give him a book to read (me something to eat, her a glass of water to drink, him the right to complain, him a week to make up his mind, us an hour to get there, myself time to think it over, etc.) дать ему прочесть книгу и т. д.; give a porter one's bags to carry (a groom one's horse to hold, etc.) попросить носильщика отнести вещи и т. д.; give him a letter to mail дать /велеть/ ему отправить письмо; give her a message to deliver дать ей записку для передачи7. XI1) be given smth. he was given a job (quarters, a rest, etc.) ему дали /предложили/ работу и т. д., he was given a book (a watch, L 50, a ring, etc.) ему подарили книгу и т. д.; be given to smb., smth. a book (a watch, etc.) was given to him ему подарили книгу и т. д., he was given a contract с ним заключили контракт; be given in some manner our services are given free of charge мы оказываем услуги бесплатно; invitations are given gratuitously (periodically, willingly, etc.) приглашения рассылаются бесплатно и т. д., be given somewhere articles (books, etc.) must be given back статьи и т. д. должны быть возвращены2) be given to smb. of all the books that have been given to the public on the problem из всех выпущенных по данному вопросу книг3) || semiaux I was given to understand that... мне дали понять, что...4) be given to smth. be given to idleness (to luxury and pleasure, to drink, to these pursuits, etc.) иметь склонность к безделью и т. д., he is much given to music он увлекается музыкой; be given in so me manner I am not given that way у меня не такой склад /характер/; be given to doing smth. be given to drinking (to day-dreaming, to lying, to contradicting, to swearing, to shooting and hunting, etc.) любить выпить, иметь пристрастие к выпивке и т. д.; he is given to stealing он нечист на руку; he is given to boasting он хвастлив || semiaux (not) be given to smb. to do smth. it is not given to him to understand it (to appreciate beauty, to express his thoughts eloquently, to become famous, etc.) ему не дано понять это и т. д.5) be given somewhere the figures (the data, the results, etc.) are given below ( above) цифры и т. д. приведены ниже (выше); as given below (above) как показано /сказано/ ниже (выше); the word (this phrase, etc.) is not given in the dictionary словарь не дает /не приводит/ этого слова и т. д., be given in some manner the prices are given separately цены даются отдельно; this is given as a hypothesis это приводится в виде гипотезы6) be given smth. he was given the name of John его назвали Джоном; be given in some manner the subtitle is given rather grandiloquently дан очень пышный подзаголовок7) be given at some place the opera (the play, etc.) was first given in Paris (on this stage, etc.) эта опера и т. д. была впервые поставлена в Париже и т. д.; be given at some time the play is to be given again next month пьеса вновь пойдет /пьесу снова покажут/ в следующем месяце8) be given smth. be given six years' imprisonment (a severe punishment, a stiff sentence, a reprieve, etc.) получить шесть лет тюрьмы и т. д.; be given for (against) smb. the decision (the judg(e)ment, etc.) was given for (against) the defendant ( the plaintiff, etc.) решение и т. д. было вынесено в пользу (против) обвиняемого и т. д.8. XVI1) give to /for/ smth., smb. give to the Red Cross (to charity, to the poor, for the relief of the victims of the flood, etc.) жертвовать [средства] в пользу Красного Креста и т. д.2) give under smth. the fence (the beam, etc.) may give under the weight забор и т. д. может рухнуть под такой тяжестью; the earth /the soil/ (the marshy ground, etc.) gave under the vehicle под тяжестью машины почва и т. д. осела; the step gave under his feet ступенька сломалась у него под ногами; the lock gave under hard pushing мы напирали на дверь, пока замок не сломался; give on smth. we can't negotiate until each side is willing to give on some points успешные переговоры невозможны [до тех пор], пока каждая сторона не пойдет на определенные уступки3) give (up)on (into, onto) smth. the window ( the door, the gate, etc.) gives (up)on the street (on the garden, on the side street, into /on(to)/ the yard, on the sea, etc.) окно и т. д. выходит на улицу и т. д., the road gave onto the highway дорога выходила на шоссе9. XVIIIgive oneself to smth. give oneself to mathematics (to study, to science, etc.) посвятить себя математике и т. д.; give oneself to thought (to meditation, to prayer, etc.) предаваться размышлениям и т. д.; the invaders gave themselves to plunder захватчики занимались грабежом10. XXI11) give smth. to smb., smth. give a book to each of the boys (food to the hungry, medicine to a patient, money to a beggar, etc.) давать каждому мальчику по книге и т. д.; money to the Red Cross (all his books to the library, his collection to the college, etc.) передать /( пожертвовать/ деньги Красному Кресту и т.; give one's hand to the visitor подать / пожать, протянуть/ руку посетителю; give a part to an actor дать актеру роль; give place to the old woman (to new methods, etc.) уступить место пожилой женщине и т. д.; give her face to the sun подставить лицо солнцу; give smth. for smb., smth. give his life for his friends (for his country, for a cause, etc.) отдать свою жизнь за друзей и т. д.; give smth. to smth., smb. give (no) thought to it (не) задумываться над этим; give [one's] attention to smb. оказывать кому-л. внимание; give credit to smth. прислушиваться к чему-л.; give credit to the report доверять сообщению || give one's ear to smb., smth. прислушиваться к кому-л., чему-л.; give ear to the rumour прислушиваться к тому, что говорят; give one's daughter in marriage выдавать /отдавать/ дочь замуж2) give smth. to smb. give the command of the regiment to him поручить ему командование полком; give my love /my kind regards, my compliments/ to her (to your family, etc.) передавать ей и т. д. привет; give smb., smth. into smb., smth. give the children into smb.'s hands (into smb.'s care, into smb.'s charge, etc.) передавать детей в чьи-л. руки и т. д., поручать детей кому-л. и т. д., give the thief into the hands of the police передать вора в руки полиции; give the prisoner into custody отдать заключенного под стражу3) give smth. to smth., smb. give perfume to the linen (an edge to the appetite, brilliance to the thing, etc.) придавать белью аромат и т. д.; give a disease to smb. (a cold to the boy, measles to a whole school, etc.) заразить кого-л. какой-л. болезнью и т. д.; give motion to the wheel привести колесо в движение; give currency to smth. пускать что-л. в обращение; give currency to rumours распускать слухи; his novel gave currency to this phrase после выхода в свет его романа это выражение стало крылатым; give rise to smth. породить /вызвать/ что-л.; his behaviour gave rise to rumours его поведение дало повод разговорам4) give smth. for smth. give five pounds for the hat (as much as L 3 for this book, a good price for the car, etc.) (заплатать пять фунтов за шляпу и т. д.; how much /what/ did you give for that? сколько вы за это заплатили?; give prizes /premiums/ for the best exhibits выдавать призы за лучшие экспонаты; give smth. to smb. give good wages to the workers хорошо платить рабочим5) give smth. to smth., smb. give one's free time to golf (one's mind to scientific research, one's attention to study, one's heart to art, one's energy to political affairs, one's love to her, etc.) отдавать все свое свободное время игре в гольф и т. д.; give one's life to science (to the cause of peace, to study, to one's duty, etc.) отдать /посвятить/ свой жизнь науке и т. д.6) give smth. with smth. give the story with many unnecessary particulars (a description with many side remarks, evidence with no trace of bias, etc.) рассказать эту историю со многими ненужными подробностями и т. д.; give the scenery with great fidelity описывать /воспроизводить/ пейзаж с большой точностью; give smth. for smth. give his reasons for his absence (for the delay, for her lateness, etc.) объяснять свое отсутствие и т. д.7) give smth. at smth. the bulletin gives the population of the country at 90 millions (the average number of attempts at 3, the number of instances at 8, etc.) в бюллетене указывается, что население этой страны ранки девяноста миллионам и т. д.; give smth. in smth. give 30° in the shade (in the sun) показывать /регистрировать/ тридцать градусов в тени (на солнце)8) give smth. to smth. the city gave its name to the battle эта ботва получила название по городу, близ которого она произошла; the largest city gave its name to the province эта область названа по самому большому городу9) give smth. for smb. give a dinner (a party, etc.) for 20 guests давать обед и т. д. на двадцать человек /персон/10) give smth. to smb. give instruction to a class of adults (lessons to children, interviews to journalists, etc.) давать уроки группе взрослых и т. д., give a talk to the recruits провести беседу с новобранцами11) give smth. to smb. give three hearty cheers to the winners встречать победителей троекратным "ура"12) || give way to smth., smb. отступать перед чем-л., кем-л.; give way to а саг (to traffic coming in from the right, to the man, etc.) пропускать автомобиль и т. д., давать дорогу автомобилю и т. д.; give way to despair впасть в отчаяние; give way to temptation (to grief, etc.) поддаться соблазну и т. д.; give way to emotions уступить чувствам, быть не в состоянии справиться со своими чувствами; give way to tears не сдержать слезы, расплакаться; give way to his whims (to him, to these impudent demands, etc.) уступать его капризам и т. д., give way to anger не сдержать гнева, дать волю гневу; give place to smth., smb. отступать перед чем-л., кем-л.; spring gave place to summer на смену весне пришло лето13) semiaux give smth., to smb., smth. give a blow to smb. нанести кому-л. удар; give a signal to the guard подавать сигнал часовому; give a turn to a key in the lock повернуть ключ в замке; give help to the needy оказывать помощь нуждающимся; give an order to the servants (a command to the soldiers. etc.) отдать распоряжение слугам и т. д.; give an answer to the man ответить этому человеку; give encouragement to the boy ободрить /подбодрить/ мальчика; give chase to a ship [начать] преследовать корабль11. XXIV1give smth. as smth. give a book (a jack-knife, etc.) as a present давать книгу и т. д. в качестве подарка, дарить книгу и т. д., give smth. as a keepsake дарить что-л. на память11 protection différentielle longitudinale
продольная дифференциальная защита
Защита, действие и селективность которой зависят от сравнения величин (или фаз и величин) токов по концам защищаемой линии.
[ http://docs.cntd.ru/document/1200069370]
продольная дифференциальная защита
Защита, срабатывание и селективность которой зависят от сравнения амплитуд или амплитуд и фаз токов на концах защищаемого участка.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
продольная дифференциальная защита линий
-
[Интент]EN
longitudinal differential protection
line differential protection (US)
protection the operation and selectivity of which depend on the comparison of magnitude or the phase and magnitude of the currents at the ends of the protected section
[ IEV ref 448-14-16]FR
protection différentielle longitudinale
protection dont le fonctionnement et la sélectivité dépendent de la comparaison des courants en amplitude, ou en phase et en amplitude, entre les extrémités de la section protégée
[ IEV ref 448-14-16]
Продольная дифференциальная защита линийЗащита основана на принципе сравнения значений и фаз токов в начале и конце линии. Для сравнения вторичные обмотки трансформаторов тока с обеих сторон линии соединяются между собой проводами, как показано на рис. 7.17. По этим проводам постоянно циркулируют вторичные токи I 1 и I 2. Для выполнения дифференциальной защиты параллельно трансформаторам тока (дифференциально) включают измерительный орган тока ОТ.
Ток в обмотке этого органа всегда будет равен геометрической сумме токов, приходящих от обоих трансформаторов тока: I Р = I 1 + I 2 Если коэффициенты трансформации трансформаторов тока ТА1 и ТА2 одинаковы, то при нормальной работе, а также внешнем КЗ (точка K1 на рис. 7.17, а) вторичные токи равны по значению I 1 =I2 и направлены в ОТ встречно. Ток в обмотке ОТ I Р = I 1 + I 2 =0, и ОТ не приходит в действие. При КЗ в защищаемой зоне (точка К2 на рис. 7.17, б) вторичные токи в обмотке ОТ совпадут по фазе и, следовательно, будут суммироваться: I Р = I 1 + I 2. Если I Р >I сз, орган тока сработает и через выходной орган ВО подействует на отключение выключателей линии.
Таким образом, дифференциальная продольная защита с постоянно циркулирующими токами в обмотке органа тока реагирует на полный ток КЗ в защищаемой зоне (участок линии, заключенный между трансформаторами тока ТА1 и ТА2), обеспечивая при этом мгновенное отключение поврежденной линии.
Практическое использование схем дифференциальных защит потребовало внесения ряда конструктивных элементов, обусловленных особенностями работы этих защит на линиях энергосистем.
Во-первых, для отключения протяженных линий с двух сторон оказалось необходимым подключение по дифференциальной схеме двух органов тока: одного на подстанции 1, другого на подстанции 2 (рис. 7.18). Подключение двух органов тока привело к неравномерному распределению вторичных токов между ними (токи распределялись обратно пропорционально сопротивлениям цепей), появлению тока небаланса и понижению чувствительности защиты. Заметим также, что этот ток небаланса суммируется в ТО с током небаланса, вызванным несовпадением характеристик намагничивания и некоторой разницей в коэффициентах трансформации трансформаторов тока. Для отстройки от токов небаланса в защите были применены не простые дифференциальные реле, а дифференциальные реле тока с торможением KAW, обладающие большей чувствительностью.
Во-вторых, соединительные провода при их значительной длине обладают сопротивлением, во много раз превышающим допустимое для трансформаторов тока сопротивление нагрузки. Для понижения нагрузки были применены специальные трансформаторы тока с коэффициентом трансформации n, с помощью которых был уменьшен в п раз ток, циркулирующий по проводам, и тем самым снижена в n2 раз нагрузка от соединительных проводов (значение нагрузки пропорционально квадрату тока). В защите эту функцию выполняют промежуточные трансформаторы тока TALT и изолирующие TAL. В схеме защиты изолирующие трансформаторы TAL служат еще и для отделения соединительных проводов от цепей реле и защиты цепей реле от высокого напряжения, наводимого в соединительных проводах во время прохождения по линии тока КЗ.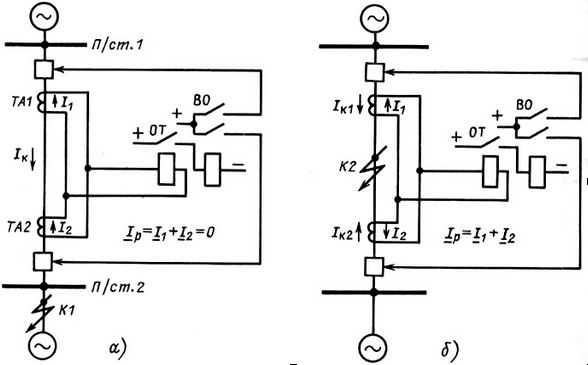
Рис. 7.17. Принцип выполнения продольной дифференциальной защиты линии и прохождение тока в органе тока при внешнем КЗ (а) и при КЗ в защищаемой зоне (б)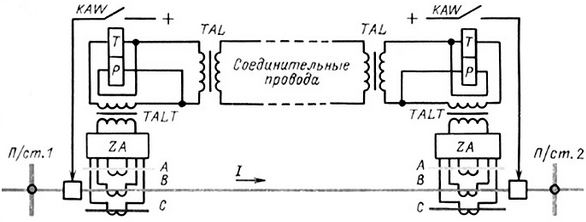
Рис. 7.18. Принципиальная схема продольной дифференциальной защиты линии:
ZA - фильтр токов прямой и обратной последовательностей; TALT - промежуточный трансформатор тока; TAL - изолирующий трансформатор; KAW - дифференциальное реле с торможением; Р - рабочая и T - тормозная обмотки релеРаспространенные в электрических сетях продольные дифференциальные защиты типа ДЗЛ построены на изложенных выше принципах и содержат элементы, указанные на рис. 7.18. Высокая стоимость соединительных проводов во вторичных цепях ДЗЛ ограничивает область се применения линиями малой протяженности (10-15 км).
Контроль исправности соединительных проводов. В эксплуатации возможны повреждения соединительных проводов: обрывы, КЗ между ними, замыкания одного провода на землю.
При обрыве соединительного провода (рис. 7.19, а) ток в рабочей Р и тормозной Т обмотках становится одинаковым и защита может неправильно сработать при сквозном КЗ и даже при токе нагрузки (в зависимости от значения Ic з .
Замыкание между соединительными проводами (рис. 7.19, б) шунтирует собой рабочие обмотки реле, и тогда защита может отказать в работе при КЗ в защищаемой зоне.
Для своевременного выявления повреждений исправность соединительных проводов контролируется специальным устройством (рис. 7.20). Контроль основан на том, что на рабочий переменный ток, циркулирующий в соединительных проводах при их исправном состоянии, накладывается выпрямленный постоянный ток, не оказывающий влияния на работу защиты. Две секции вторичной обмотки TAL соединены разделительным конденсатором С1, представляющим собой большое сопротивление для постоянного тока и малое для переменного. Благодаря конденсаторам С1 в обоих комплектах защит создается последовательная цепь циркуляции выпрямленного тока по соединительным проводам и обмоткам минимальных быстродействующих реле тока контроля КА. Выпрямленное напряжение подводится к соединительным проводам только на одной подстанции, где устройство контроля имеет выпрямитель VS, получающий в свою очередь питание от трансформатора напряжения TV рабочей системы шин. Подключение устройства контроля к той или другой системе шин осуществляется вспомогательными контактами шинных разъединителей или. реле-повторителями шинных разъединителей защищаемой линии.
Замыкающие контакты КЛ контролируют цепи выходных органов защиты.
При обрыве соединительных проводов постоянный ток исчезает, и реле контроля КА снимает оперативный ток с защит на обеих подстанциях, и подастся сигнал о повреждении. При замыкании соединительных проводов между собой подается сигнал о выводе защиты из действия, но только с одной стороны - со стороны подстанции, где нет выпрямителя.
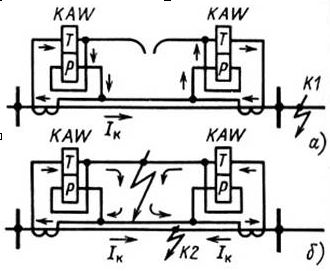
Рис. 7.19. Прохождение тока в обмотках реле KAW при обрыве (а) и замыкании между собой соединительных проводов (б):
К1 - точка сквозного КЗ; К2 - точка КЗ в защищаемой зоне
В устройстве контроля имеется приспособление для периодических измерений сопротивления изоляции соединительных проводов относительно земли. Оно подаст сигнал при снижении сопротивления изоляции любого из соединительных проводов ниже 15-20 кОм.
Если соединительные провода исправны, ток контроля, проходящий по ним, не превышает 5-6 мА при напряжении 80 В. Эти значения должны периодически проверяться оперативным персоналом в соответствии с инструкцией по эксплуатации защиты.
Оперативному персоналу следует помнить, что перед допуском к любого рода работам на соединительных проводах необходимо отключать с обеих сторон продольную дифференциальную защиту, устройство контроля соединительных проводов и пуск от защиты устройства резервирования при отказе выключателей УРОВ.
После окончания работ на соединительных проводах следует проверить их исправность. Для этого включается устройство контроля на подстанции, где оно не имеет выпрямителя, при этом должен появиться сигнал неисправности. Затем устройство контроля включают на другой подстанции (на соединительные провода подают выпрямленное напряжение) и проверяют, нет ли сигнала о повреждении. Защиту и цепь пуска УРОВ от защиты вводят в работу при исправных соединительных проводах.[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-5.html]
Тематики
Синонимы
EN
DE
- Längsdifferentialschutz, m
FR
Франко-русский словарь нормативно-технической терминологии > protection différentielle longitudinale
12 Längsdifferentialschutz, m
продольная дифференциальная защита
Защита, действие и селективность которой зависят от сравнения величин (или фаз и величин) токов по концам защищаемой линии.
[ http://docs.cntd.ru/document/1200069370]
продольная дифференциальная защита
Защита, срабатывание и селективность которой зависят от сравнения амплитуд или амплитуд и фаз токов на концах защищаемого участка.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
продольная дифференциальная защита линий
-
[Интент]EN
longitudinal differential protection
line differential protection (US)
protection the operation and selectivity of which depend on the comparison of magnitude or the phase and magnitude of the currents at the ends of the protected section
[ IEV ref 448-14-16]FR
protection différentielle longitudinale
protection dont le fonctionnement et la sélectivité dépendent de la comparaison des courants en amplitude, ou en phase et en amplitude, entre les extrémités de la section protégée
[ IEV ref 448-14-16]
Продольная дифференциальная защита линийЗащита основана на принципе сравнения значений и фаз токов в начале и конце линии. Для сравнения вторичные обмотки трансформаторов тока с обеих сторон линии соединяются между собой проводами, как показано на рис. 7.17. По этим проводам постоянно циркулируют вторичные токи I 1 и I 2. Для выполнения дифференциальной защиты параллельно трансформаторам тока (дифференциально) включают измерительный орган тока ОТ.
Ток в обмотке этого органа всегда будет равен геометрической сумме токов, приходящих от обоих трансформаторов тока: I Р = I 1 + I 2 Если коэффициенты трансформации трансформаторов тока ТА1 и ТА2 одинаковы, то при нормальной работе, а также внешнем КЗ (точка K1 на рис. 7.17, а) вторичные токи равны по значению I 1 =I2 и направлены в ОТ встречно. Ток в обмотке ОТ I Р = I 1 + I 2 =0, и ОТ не приходит в действие. При КЗ в защищаемой зоне (точка К2 на рис. 7.17, б) вторичные токи в обмотке ОТ совпадут по фазе и, следовательно, будут суммироваться: I Р = I 1 + I 2. Если I Р >I сз, орган тока сработает и через выходной орган ВО подействует на отключение выключателей линии.
Таким образом, дифференциальная продольная защита с постоянно циркулирующими токами в обмотке органа тока реагирует на полный ток КЗ в защищаемой зоне (участок линии, заключенный между трансформаторами тока ТА1 и ТА2), обеспечивая при этом мгновенное отключение поврежденной линии.
Практическое использование схем дифференциальных защит потребовало внесения ряда конструктивных элементов, обусловленных особенностями работы этих защит на линиях энергосистем.
Во-первых, для отключения протяженных линий с двух сторон оказалось необходимым подключение по дифференциальной схеме двух органов тока: одного на подстанции 1, другого на подстанции 2 (рис. 7.18). Подключение двух органов тока привело к неравномерному распределению вторичных токов между ними (токи распределялись обратно пропорционально сопротивлениям цепей), появлению тока небаланса и понижению чувствительности защиты. Заметим также, что этот ток небаланса суммируется в ТО с током небаланса, вызванным несовпадением характеристик намагничивания и некоторой разницей в коэффициентах трансформации трансформаторов тока. Для отстройки от токов небаланса в защите были применены не простые дифференциальные реле, а дифференциальные реле тока с торможением KAW, обладающие большей чувствительностью.
Во-вторых, соединительные провода при их значительной длине обладают сопротивлением, во много раз превышающим допустимое для трансформаторов тока сопротивление нагрузки. Для понижения нагрузки были применены специальные трансформаторы тока с коэффициентом трансформации n, с помощью которых был уменьшен в п раз ток, циркулирующий по проводам, и тем самым снижена в n2 раз нагрузка от соединительных проводов (значение нагрузки пропорционально квадрату тока). В защите эту функцию выполняют промежуточные трансформаторы тока TALT и изолирующие TAL. В схеме защиты изолирующие трансформаторы TAL служат еще и для отделения соединительных проводов от цепей реле и защиты цепей реле от высокого напряжения, наводимого в соединительных проводах во время прохождения по линии тока КЗ.
Рис. 7.17. Принцип выполнения продольной дифференциальной защиты линии и прохождение тока в органе тока при внешнем КЗ (а) и при КЗ в защищаемой зоне (б)
Рис. 7.18. Принципиальная схема продольной дифференциальной защиты линии:
ZA - фильтр токов прямой и обратной последовательностей; TALT - промежуточный трансформатор тока; TAL - изолирующий трансформатор; KAW - дифференциальное реле с торможением; Р - рабочая и T - тормозная обмотки релеРаспространенные в электрических сетях продольные дифференциальные защиты типа ДЗЛ построены на изложенных выше принципах и содержат элементы, указанные на рис. 7.18. Высокая стоимость соединительных проводов во вторичных цепях ДЗЛ ограничивает область се применения линиями малой протяженности (10-15 км).
Контроль исправности соединительных проводов. В эксплуатации возможны повреждения соединительных проводов: обрывы, КЗ между ними, замыкания одного провода на землю.
При обрыве соединительного провода (рис. 7.19, а) ток в рабочей Р и тормозной Т обмотках становится одинаковым и защита может неправильно сработать при сквозном КЗ и даже при токе нагрузки (в зависимости от значения Ic з .
Замыкание между соединительными проводами (рис. 7.19, б) шунтирует собой рабочие обмотки реле, и тогда защита может отказать в работе при КЗ в защищаемой зоне.
Для своевременного выявления повреждений исправность соединительных проводов контролируется специальным устройством (рис. 7.20). Контроль основан на том, что на рабочий переменный ток, циркулирующий в соединительных проводах при их исправном состоянии, накладывается выпрямленный постоянный ток, не оказывающий влияния на работу защиты. Две секции вторичной обмотки TAL соединены разделительным конденсатором С1, представляющим собой большое сопротивление для постоянного тока и малое для переменного. Благодаря конденсаторам С1 в обоих комплектах защит создается последовательная цепь циркуляции выпрямленного тока по соединительным проводам и обмоткам минимальных быстродействующих реле тока контроля КА. Выпрямленное напряжение подводится к соединительным проводам только на одной подстанции, где устройство контроля имеет выпрямитель VS, получающий в свою очередь питание от трансформатора напряжения TV рабочей системы шин. Подключение устройства контроля к той или другой системе шин осуществляется вспомогательными контактами шинных разъединителей или. реле-повторителями шинных разъединителей защищаемой линии.
Замыкающие контакты КЛ контролируют цепи выходных органов защиты.
При обрыве соединительных проводов постоянный ток исчезает, и реле контроля КА снимает оперативный ток с защит на обеих подстанциях, и подастся сигнал о повреждении. При замыкании соединительных проводов между собой подается сигнал о выводе защиты из действия, но только с одной стороны - со стороны подстанции, где нет выпрямителя.
Рис. 7.19. Прохождение тока в обмотках реле KAW при обрыве (а) и замыкании между собой соединительных проводов (б):
К1 - точка сквозного КЗ; К2 - точка КЗ в защищаемой зоне
В устройстве контроля имеется приспособление для периодических измерений сопротивления изоляции соединительных проводов относительно земли. Оно подаст сигнал при снижении сопротивления изоляции любого из соединительных проводов ниже 15-20 кОм.
Если соединительные провода исправны, ток контроля, проходящий по ним, не превышает 5-6 мА при напряжении 80 В. Эти значения должны периодически проверяться оперативным персоналом в соответствии с инструкцией по эксплуатации защиты.
Оперативному персоналу следует помнить, что перед допуском к любого рода работам на соединительных проводах необходимо отключать с обеих сторон продольную дифференциальную защиту, устройство контроля соединительных проводов и пуск от защиты устройства резервирования при отказе выключателей УРОВ.
После окончания работ на соединительных проводах следует проверить их исправность. Для этого включается устройство контроля на подстанции, где оно не имеет выпрямителя, при этом должен появиться сигнал неисправности. Затем устройство контроля включают на другой подстанции (на соединительные провода подают выпрямленное напряжение) и проверяют, нет ли сигнала о повреждении. Защиту и цепь пуска УРОВ от защиты вводят в работу при исправных соединительных проводах.[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-5.html]
Тематики
Синонимы
EN
DE
- Längsdifferentialschutz, m
FR
Немецко-русский словарь нормативно-технической терминологии > Längsdifferentialschutz, m
13 line differential protection
продольная дифференциальная защита
Защита, действие и селективность которой зависят от сравнения величин (или фаз и величин) токов по концам защищаемой линии.
[ http://docs.cntd.ru/document/1200069370]
продольная дифференциальная защита
Защита, срабатывание и селективность которой зависят от сравнения амплитуд или амплитуд и фаз токов на концах защищаемого участка.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
продольная дифференциальная защита линий
-
[Интент]EN
longitudinal differential protection
line differential protection (US)
protection the operation and selectivity of which depend on the comparison of magnitude or the phase and magnitude of the currents at the ends of the protected section
[ IEV ref 448-14-16]FR
protection différentielle longitudinale
protection dont le fonctionnement et la sélectivité dépendent de la comparaison des courants en amplitude, ou en phase et en amplitude, entre les extrémités de la section protégée
[ IEV ref 448-14-16]
Продольная дифференциальная защита линийЗащита основана на принципе сравнения значений и фаз токов в начале и конце линии. Для сравнения вторичные обмотки трансформаторов тока с обеих сторон линии соединяются между собой проводами, как показано на рис. 7.17. По этим проводам постоянно циркулируют вторичные токи I 1 и I 2. Для выполнения дифференциальной защиты параллельно трансформаторам тока (дифференциально) включают измерительный орган тока ОТ.
Ток в обмотке этого органа всегда будет равен геометрической сумме токов, приходящих от обоих трансформаторов тока: I Р = I 1 + I 2 Если коэффициенты трансформации трансформаторов тока ТА1 и ТА2 одинаковы, то при нормальной работе, а также внешнем КЗ (точка K1 на рис. 7.17, а) вторичные токи равны по значению I 1 =I2 и направлены в ОТ встречно. Ток в обмотке ОТ I Р = I 1 + I 2 =0, и ОТ не приходит в действие. При КЗ в защищаемой зоне (точка К2 на рис. 7.17, б) вторичные токи в обмотке ОТ совпадут по фазе и, следовательно, будут суммироваться: I Р = I 1 + I 2. Если I Р >I сз, орган тока сработает и через выходной орган ВО подействует на отключение выключателей линии.
Таким образом, дифференциальная продольная защита с постоянно циркулирующими токами в обмотке органа тока реагирует на полный ток КЗ в защищаемой зоне (участок линии, заключенный между трансформаторами тока ТА1 и ТА2), обеспечивая при этом мгновенное отключение поврежденной линии.
Практическое использование схем дифференциальных защит потребовало внесения ряда конструктивных элементов, обусловленных особенностями работы этих защит на линиях энергосистем.
Во-первых, для отключения протяженных линий с двух сторон оказалось необходимым подключение по дифференциальной схеме двух органов тока: одного на подстанции 1, другого на подстанции 2 (рис. 7.18). Подключение двух органов тока привело к неравномерному распределению вторичных токов между ними (токи распределялись обратно пропорционально сопротивлениям цепей), появлению тока небаланса и понижению чувствительности защиты. Заметим также, что этот ток небаланса суммируется в ТО с током небаланса, вызванным несовпадением характеристик намагничивания и некоторой разницей в коэффициентах трансформации трансформаторов тока. Для отстройки от токов небаланса в защите были применены не простые дифференциальные реле, а дифференциальные реле тока с торможением KAW, обладающие большей чувствительностью.
Во-вторых, соединительные провода при их значительной длине обладают сопротивлением, во много раз превышающим допустимое для трансформаторов тока сопротивление нагрузки. Для понижения нагрузки были применены специальные трансформаторы тока с коэффициентом трансформации n, с помощью которых был уменьшен в п раз ток, циркулирующий по проводам, и тем самым снижена в n2 раз нагрузка от соединительных проводов (значение нагрузки пропорционально квадрату тока). В защите эту функцию выполняют промежуточные трансформаторы тока TALT и изолирующие TAL. В схеме защиты изолирующие трансформаторы TAL служат еще и для отделения соединительных проводов от цепей реле и защиты цепей реле от высокого напряжения, наводимого в соединительных проводах во время прохождения по линии тока КЗ.
Рис. 7.17. Принцип выполнения продольной дифференциальной защиты линии и прохождение тока в органе тока при внешнем КЗ (а) и при КЗ в защищаемой зоне (б)
Рис. 7.18. Принципиальная схема продольной дифференциальной защиты линии:
ZA - фильтр токов прямой и обратной последовательностей; TALT - промежуточный трансформатор тока; TAL - изолирующий трансформатор; KAW - дифференциальное реле с торможением; Р - рабочая и T - тормозная обмотки релеРаспространенные в электрических сетях продольные дифференциальные защиты типа ДЗЛ построены на изложенных выше принципах и содержат элементы, указанные на рис. 7.18. Высокая стоимость соединительных проводов во вторичных цепях ДЗЛ ограничивает область се применения линиями малой протяженности (10-15 км).
Контроль исправности соединительных проводов. В эксплуатации возможны повреждения соединительных проводов: обрывы, КЗ между ними, замыкания одного провода на землю.
При обрыве соединительного провода (рис. 7.19, а) ток в рабочей Р и тормозной Т обмотках становится одинаковым и защита может неправильно сработать при сквозном КЗ и даже при токе нагрузки (в зависимости от значения Ic з .
Замыкание между соединительными проводами (рис. 7.19, б) шунтирует собой рабочие обмотки реле, и тогда защита может отказать в работе при КЗ в защищаемой зоне.
Для своевременного выявления повреждений исправность соединительных проводов контролируется специальным устройством (рис. 7.20). Контроль основан на том, что на рабочий переменный ток, циркулирующий в соединительных проводах при их исправном состоянии, накладывается выпрямленный постоянный ток, не оказывающий влияния на работу защиты. Две секции вторичной обмотки TAL соединены разделительным конденсатором С1, представляющим собой большое сопротивление для постоянного тока и малое для переменного. Благодаря конденсаторам С1 в обоих комплектах защит создается последовательная цепь циркуляции выпрямленного тока по соединительным проводам и обмоткам минимальных быстродействующих реле тока контроля КА. Выпрямленное напряжение подводится к соединительным проводам только на одной подстанции, где устройство контроля имеет выпрямитель VS, получающий в свою очередь питание от трансформатора напряжения TV рабочей системы шин. Подключение устройства контроля к той или другой системе шин осуществляется вспомогательными контактами шинных разъединителей или. реле-повторителями шинных разъединителей защищаемой линии.
Замыкающие контакты КЛ контролируют цепи выходных органов защиты.
При обрыве соединительных проводов постоянный ток исчезает, и реле контроля КА снимает оперативный ток с защит на обеих подстанциях, и подастся сигнал о повреждении. При замыкании соединительных проводов между собой подается сигнал о выводе защиты из действия, но только с одной стороны - со стороны подстанции, где нет выпрямителя.
Рис. 7.19. Прохождение тока в обмотках реле KAW при обрыве (а) и замыкании между собой соединительных проводов (б):
К1 - точка сквозного КЗ; К2 - точка КЗ в защищаемой зоне
В устройстве контроля имеется приспособление для периодических измерений сопротивления изоляции соединительных проводов относительно земли. Оно подаст сигнал при снижении сопротивления изоляции любого из соединительных проводов ниже 15-20 кОм.
Если соединительные провода исправны, ток контроля, проходящий по ним, не превышает 5-6 мА при напряжении 80 В. Эти значения должны периодически проверяться оперативным персоналом в соответствии с инструкцией по эксплуатации защиты.
Оперативному персоналу следует помнить, что перед допуском к любого рода работам на соединительных проводах необходимо отключать с обеих сторон продольную дифференциальную защиту, устройство контроля соединительных проводов и пуск от защиты устройства резервирования при отказе выключателей УРОВ.
После окончания работ на соединительных проводах следует проверить их исправность. Для этого включается устройство контроля на подстанции, где оно не имеет выпрямителя, при этом должен появиться сигнал неисправности. Затем устройство контроля включают на другой подстанции (на соединительные провода подают выпрямленное напряжение) и проверяют, нет ли сигнала о повреждении. Защиту и цепь пуска УРОВ от защиты вводят в работу при исправных соединительных проводах.[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-5.html]
Тематики
Синонимы
EN
DE
- Längsdifferentialschutz, m
FR
Англо-русский словарь нормативно-технической терминологии > line differential protection
14 voltage controlled overcurrent relay
максимальная токовая защита с пуском по напряжению
—
[В.А.Семенов. Англо-русский словарь по релейной защите]
Максимальная токовая защита с пуском от реле минимального напряженияМаксимальная токовая защита реагирует на увеличение тока в защищаемом элементе сети. Она применяется для защиты линий, имеющих одностороннее питание, на линиях устанавливается со стороны источника питания и воздействует на отключение выключателя в случае повреждения на защищаемой линии или на шинах подстанций, питающихся от этой линии. Селективность защит обеспечивается подбором выдержек времени, нарастающих ступенями в сторону источника питания (рис. 7.5). Ступень времени Δt =t2-t1≈0,4÷0,8 с. Так, при повреждении в точке K1 по реле защит на подстанциях 1 и 2 будет проходить один и тот же ток Iк. Однако защита на подстанции 1 сработает быстрее и отключит поврежденную линию. Защита на подстанции 2 в этом случае не успеет сработать на отключение и вернется в исходное положение.
Токовая отсечка - это максимальная токовая защита, селективность действия которой обеспечивается не ступенчатым подбором выдержек времени в подавляющем большинстве случаев отсечка действует мгновенно, а выбором тока срабатывания. Известно, что ток КЗ уменьшается по мере удаления места КЗ от источника питания. Ток срабатывания отсечки Iсз по значению выбирается таким, чтобы отсечка надежно срабатывала при КЗ на заранее определенном участке линии (например, на участке АВ, рис. 7.6) и не приходила в действие при КЗ за пределами этого участка, где Iк< I сз, например в точке С. Таким образом, токовая отсечка защищает часть линии, а не всю линию.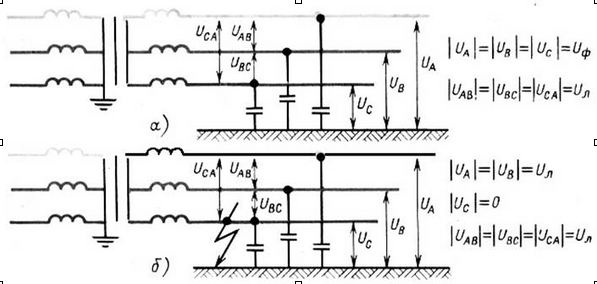
Рис. 7.2. Нормальный (а) и утяжеленный (б) режимы работы электрической сети с изолированной нейтралью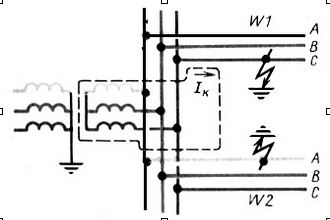
Рис. 7.3. Замыкание двух фаз на землю в сети с изолированной нейтралью приводит к КЗ. Штриховой линией показан путь тока КЗТоковая отсечка применяется для защиты линий с односторонним и двухсторонним питанием и, кроме того, для защиты трансформаторов. В последнем случае отсечка устанавливается с питающей стороны трансформатора и действует при повреждениях на вводах ВН и в некоторой части первичной обмотки. При повреждениях вторичной обмотки отсечка не срабатывает.
Максимальная направленная защита (рис. 7.7) применяется для защиты сетей с двухсторонним питанием. Она реагирует на определенные значения тока КЗ и его направление. Орган направления в схеме защиты разрешает ей срабатывать на отключение выключателя, если ток КЗ направлен от шин в сторону защищаемой линии. Селективность действия пускового органа защиты достигается выбором выдержек времени по указанному выше ступенчатому принципу.
Максимальные направленные защиты устанавливаются с обеих сторон защищаемых линий. В качестве основных защит их применяют в сетях напряжением до 35 кВ.
Максимальная токовая защита с пуском от реле минимального напряжения. Одним из недостатков максимальных токовых защит является недостаточная чувствительность при КЗ в разветвленных (с большим числом параллельных линий) сильно загруженных сетях. Повышение чувствительности и улучшение отстройки от токов нагрузки достигаются применением пуска защит от реле минимального напряжения (рис. 7.8). Из схемы видно, что защита может действовать только при срабатывании реле KV, уставка которого выбирается ниже минимально возможного уровня рабочего напряжения. При КЗ напряжение в сети существенно понижается, реле напряжения срабатывает, предоставляя возможность токовому органу защиты действовать на отключение.
Ток срабатывания токовых реле КА выбирается по значению длительного тока нагрузки нормального режима, в результате чего чувствительность защиты при КЗ резко повышается. При кратковременных перегрузках линий токовые реле могут замыкать свои контакты, что, однако, не приводит к срабатыванию защиты на отключение: этому препятствуют реле минимального напряжения, контакты которых в нормальном рабочем режиме разомкнуты.
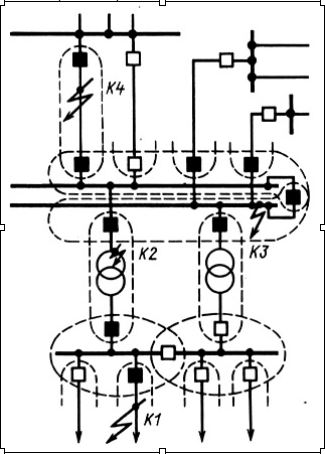
Рис. 7.4. Участки схемы, отключаемые при КЗ: К1-К4 - точки КЗ. Выключатели, отключившиеся при КЗ, зачернены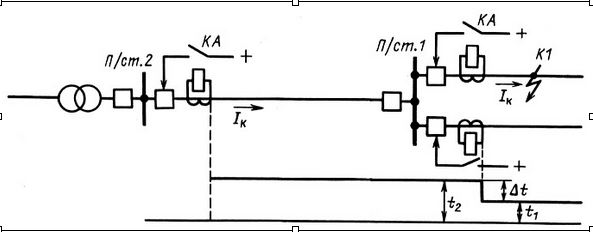
Рис. 7.5. Применение максимальных токовых защит в сети с односторонним питанием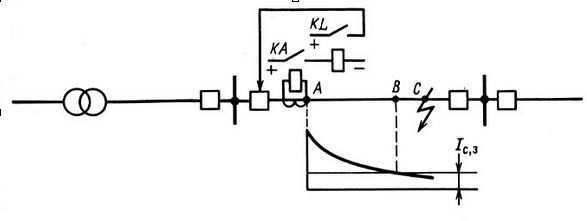
Рис. 7.6. Зона действия отсечки на линии с односторонним питаниемНаличие напряжения на зажимах реле минимального напряжения постоянно контролируется специальным устройством (на рис. 7.8 не показано), подающим сигнал и выводящим защиту из действия при обрывах и повреждениях вторичных цепей трансформаторов напряжения.
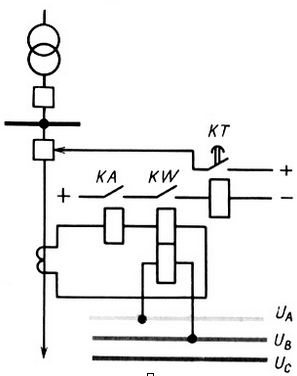
Рис. 7.7. Принципиальная схема максимальной направленной защиты линии:
КA - токовое реле (пусковой орган); KW - реле мощности (орган направления мощности КЗ); КТ - реле времени (орган выдержки времени)[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-2.html]
Тематики
EN
Англо-русский словарь нормативно-технической терминологии > voltage controlled overcurrent relay
15 longitudinal differential protection
продольная дифференциальная защита
Защита, действие и селективность которой зависят от сравнения величин (или фаз и величин) токов по концам защищаемой линии.
[ http://docs.cntd.ru/document/1200069370]
продольная дифференциальная защита
Защита, срабатывание и селективность которой зависят от сравнения амплитуд или амплитуд и фаз токов на концах защищаемого участка.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
продольная дифференциальная защита линий
-
[Интент]EN
longitudinal differential protection
line differential protection (US)
protection the operation and selectivity of which depend on the comparison of magnitude or the phase and magnitude of the currents at the ends of the protected section
[ IEV ref 448-14-16]FR
protection différentielle longitudinale
protection dont le fonctionnement et la sélectivité dépendent de la comparaison des courants en amplitude, ou en phase et en amplitude, entre les extrémités de la section protégée
[ IEV ref 448-14-16]
Продольная дифференциальная защита линийЗащита основана на принципе сравнения значений и фаз токов в начале и конце линии. Для сравнения вторичные обмотки трансформаторов тока с обеих сторон линии соединяются между собой проводами, как показано на рис. 7.17. По этим проводам постоянно циркулируют вторичные токи I 1 и I 2. Для выполнения дифференциальной защиты параллельно трансформаторам тока (дифференциально) включают измерительный орган тока ОТ.
Ток в обмотке этого органа всегда будет равен геометрической сумме токов, приходящих от обоих трансформаторов тока: I Р = I 1 + I 2 Если коэффициенты трансформации трансформаторов тока ТА1 и ТА2 одинаковы, то при нормальной работе, а также внешнем КЗ (точка K1 на рис. 7.17, а) вторичные токи равны по значению I 1 =I2 и направлены в ОТ встречно. Ток в обмотке ОТ I Р = I 1 + I 2 =0, и ОТ не приходит в действие. При КЗ в защищаемой зоне (точка К2 на рис. 7.17, б) вторичные токи в обмотке ОТ совпадут по фазе и, следовательно, будут суммироваться: I Р = I 1 + I 2. Если I Р >I сз, орган тока сработает и через выходной орган ВО подействует на отключение выключателей линии.
Таким образом, дифференциальная продольная защита с постоянно циркулирующими токами в обмотке органа тока реагирует на полный ток КЗ в защищаемой зоне (участок линии, заключенный между трансформаторами тока ТА1 и ТА2), обеспечивая при этом мгновенное отключение поврежденной линии.
Практическое использование схем дифференциальных защит потребовало внесения ряда конструктивных элементов, обусловленных особенностями работы этих защит на линиях энергосистем.
Во-первых, для отключения протяженных линий с двух сторон оказалось необходимым подключение по дифференциальной схеме двух органов тока: одного на подстанции 1, другого на подстанции 2 (рис. 7.18). Подключение двух органов тока привело к неравномерному распределению вторичных токов между ними (токи распределялись обратно пропорционально сопротивлениям цепей), появлению тока небаланса и понижению чувствительности защиты. Заметим также, что этот ток небаланса суммируется в ТО с током небаланса, вызванным несовпадением характеристик намагничивания и некоторой разницей в коэффициентах трансформации трансформаторов тока. Для отстройки от токов небаланса в защите были применены не простые дифференциальные реле, а дифференциальные реле тока с торможением KAW, обладающие большей чувствительностью.
Во-вторых, соединительные провода при их значительной длине обладают сопротивлением, во много раз превышающим допустимое для трансформаторов тока сопротивление нагрузки. Для понижения нагрузки были применены специальные трансформаторы тока с коэффициентом трансформации n, с помощью которых был уменьшен в п раз ток, циркулирующий по проводам, и тем самым снижена в n2 раз нагрузка от соединительных проводов (значение нагрузки пропорционально квадрату тока). В защите эту функцию выполняют промежуточные трансформаторы тока TALT и изолирующие TAL. В схеме защиты изолирующие трансформаторы TAL служат еще и для отделения соединительных проводов от цепей реле и защиты цепей реле от высокого напряжения, наводимого в соединительных проводах во время прохождения по линии тока КЗ.
Рис. 7.17. Принцип выполнения продольной дифференциальной защиты линии и прохождение тока в органе тока при внешнем КЗ (а) и при КЗ в защищаемой зоне (б)
Рис. 7.18. Принципиальная схема продольной дифференциальной защиты линии:
ZA - фильтр токов прямой и обратной последовательностей; TALT - промежуточный трансформатор тока; TAL - изолирующий трансформатор; KAW - дифференциальное реле с торможением; Р - рабочая и T - тормозная обмотки релеРаспространенные в электрических сетях продольные дифференциальные защиты типа ДЗЛ построены на изложенных выше принципах и содержат элементы, указанные на рис. 7.18. Высокая стоимость соединительных проводов во вторичных цепях ДЗЛ ограничивает область се применения линиями малой протяженности (10-15 км).
Контроль исправности соединительных проводов. В эксплуатации возможны повреждения соединительных проводов: обрывы, КЗ между ними, замыкания одного провода на землю.
При обрыве соединительного провода (рис. 7.19, а) ток в рабочей Р и тормозной Т обмотках становится одинаковым и защита может неправильно сработать при сквозном КЗ и даже при токе нагрузки (в зависимости от значения Ic з .
Замыкание между соединительными проводами (рис. 7.19, б) шунтирует собой рабочие обмотки реле, и тогда защита может отказать в работе при КЗ в защищаемой зоне.
Для своевременного выявления повреждений исправность соединительных проводов контролируется специальным устройством (рис. 7.20). Контроль основан на том, что на рабочий переменный ток, циркулирующий в соединительных проводах при их исправном состоянии, накладывается выпрямленный постоянный ток, не оказывающий влияния на работу защиты. Две секции вторичной обмотки TAL соединены разделительным конденсатором С1, представляющим собой большое сопротивление для постоянного тока и малое для переменного. Благодаря конденсаторам С1 в обоих комплектах защит создается последовательная цепь циркуляции выпрямленного тока по соединительным проводам и обмоткам минимальных быстродействующих реле тока контроля КА. Выпрямленное напряжение подводится к соединительным проводам только на одной подстанции, где устройство контроля имеет выпрямитель VS, получающий в свою очередь питание от трансформатора напряжения TV рабочей системы шин. Подключение устройства контроля к той или другой системе шин осуществляется вспомогательными контактами шинных разъединителей или. реле-повторителями шинных разъединителей защищаемой линии.
Замыкающие контакты КЛ контролируют цепи выходных органов защиты.
При обрыве соединительных проводов постоянный ток исчезает, и реле контроля КА снимает оперативный ток с защит на обеих подстанциях, и подастся сигнал о повреждении. При замыкании соединительных проводов между собой подается сигнал о выводе защиты из действия, но только с одной стороны - со стороны подстанции, где нет выпрямителя.
Рис. 7.19. Прохождение тока в обмотках реле KAW при обрыве (а) и замыкании между собой соединительных проводов (б):
К1 - точка сквозного КЗ; К2 - точка КЗ в защищаемой зоне
В устройстве контроля имеется приспособление для периодических измерений сопротивления изоляции соединительных проводов относительно земли. Оно подаст сигнал при снижении сопротивления изоляции любого из соединительных проводов ниже 15-20 кОм.
Если соединительные провода исправны, ток контроля, проходящий по ним, не превышает 5-6 мА при напряжении 80 В. Эти значения должны периодически проверяться оперативным персоналом в соответствии с инструкцией по эксплуатации защиты.
Оперативному персоналу следует помнить, что перед допуском к любого рода работам на соединительных проводах необходимо отключать с обеих сторон продольную дифференциальную защиту, устройство контроля соединительных проводов и пуск от защиты устройства резервирования при отказе выключателей УРОВ.
После окончания работ на соединительных проводах следует проверить их исправность. Для этого включается устройство контроля на подстанции, где оно не имеет выпрямителя, при этом должен появиться сигнал неисправности. Затем устройство контроля включают на другой подстанции (на соединительные провода подают выпрямленное напряжение) и проверяют, нет ли сигнала о повреждении. Защиту и цепь пуска УРОВ от защиты вводят в работу при исправных соединительных проводах.[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-5.html]
Тематики
Синонимы
EN
DE
- Längsdifferentialschutz, m
FR
продольно-дифференциальная защита
-
[В.А.Семенов. Англо-русский словарь по релейной защите]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > longitudinal differential protection
См. также в других словарях:
Список эпизодов телесериала «Вспомни, что будет» — Ниже приведён список эпизодов телесериала «Вспомни, что будет», премьера которого состоялась 24 сентября 2009 года на канале «ABC». 14 мая 2010 года компания «ABC» объявила о прекращении показа сериала в связи с низкими рейтингами.[1] 27 мая 2010 … Википедия
АЭРОДИНАМИКА — раздел механики сплошных сред, в котором изучаются закономерности движения воздуха и других газов, а также характеристики тел, движущихся в воздухе. К аэродинамическим характеристикам тел относятся подъемная сила и сила сопротивления и их… … Энциклопедия Кольера
Квантовая механика — волновая механика, теория устанавливающая способ описания и законы движения микрочастиц (элементарных частиц, атомов, молекул, атомных ядер) и их систем (например, кристаллов) а также связь величин, характеризующих частицы и системы, с… … Большая советская энциклопедия
Развернутые вариативные повторы, РВП — – смысловые единицы научного текста различной протяженности (от словосочетания до нескольких абзацев), дословно или с перефразировкой повторяющие высказанное ранее в тексте положение и содержащие в своей структуре элементы нового знания, т.е.… … Стилистический энциклопедический словарь русского языка
Нейронная сеть Хопфилда — Нейронная сеть Хопфилда полносвязная нейронная сеть с симметричной матрицей связей. В процессе работы динамика таких сетей сходится (конвергирует) к одному из положений равновесия. Эти положения равновесия являются локальными минимумами… … Википедия
Непрерывность множества действительных чисел — Непрерывность действительных чисел свойство системы действительных чисел , которым не обладает множество рациональных чисел . Иногда вместо непрерывности говорят о полноте системы действительных чисел[1]. Существует несколько различных… … Википедия
Корреляция — (Correlation) Корреляция это статистическая взаимосвязь двух или нескольких случайных величин Понятие корреляции, виды корреляции, коэффициент корреляции, корреляционный анализ, корреляция цен, корреляция валютных пар на Форекс Содержание… … Энциклопедия инвестора
Вода — С древнейших времен стали понимать великое значение воды не только для людей и всяких животных и растительных организмов, но и для всей жизни Земли. Некоторые из первых греческих философов ставили воду даже во главе понимания вещей в природе, и… … Энциклопедический словарь Ф.А. Брокгауза и И.А. Ефрона
Риск — (Risk) Риск (Risk) это возможная опасность какого либо неблагоприятного исхода Риск, управление, группы и факторы риска, характористика, история, и вероятность риска Содержание >>>>>>>>>>>>>>> Риск (Risk) это, опре … Энциклопедия инвестора
Солнечная система — в представлении художника. Масштабы расстояний от Солнца не соблюдены. Общие характеристики Возраст … Википедия
Риск — У этого термина существуют и другие значения, см. Риск (значения). В данной статье или разделе имеется список источников или внешних ссылок, но ис … Википедия
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на русский
с русского на все языки- С русского на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Немецкий
- Русский
- Французский